- 非IC关键词
企业档案


友情链接



产品信息
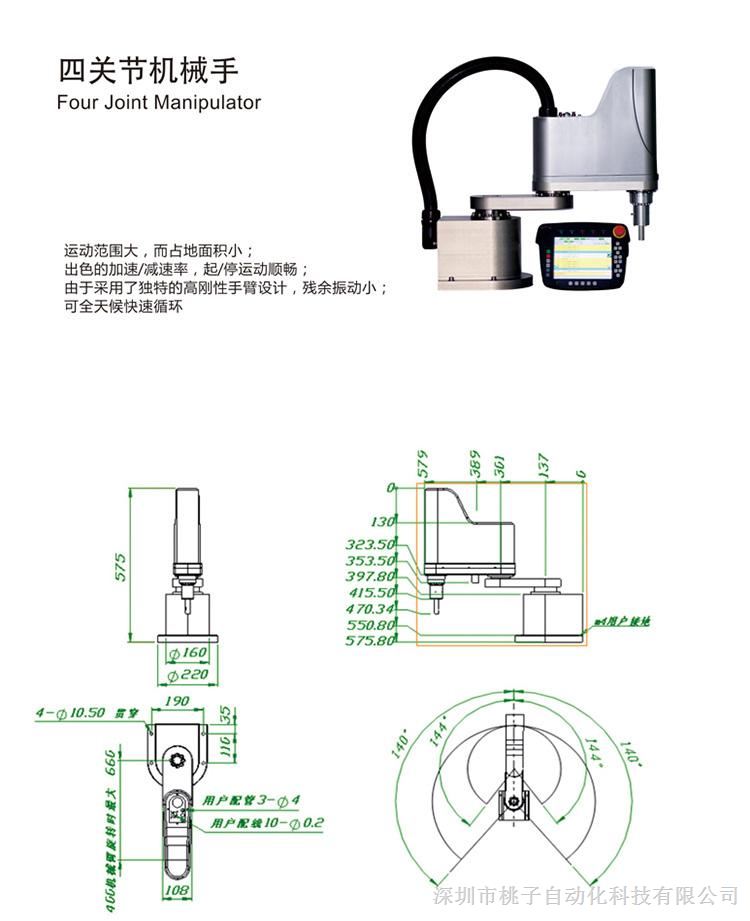
四轴多关节机械手臂设备简介
1 、简介
针对目前市场上,XY 机构型锁螺丝设备存在体积大、不易移动、柔性差、开发周期长、与自动化产线相结合难等问题,在具有 SCARA 开发成熟经验的基础上,我司推出了基于 SCARA 的系列锁螺丝解决方案
(1) 针对 XY 体积大,不易移动的问题,我司开发了专门用于锁螺丝的 3 轴 SCARA机器人;
(2) 该机械手可安装锁螺丝,点胶,搬运安装包,可柔性切换机械手的应用。
2 、锁螺丝机器人本体
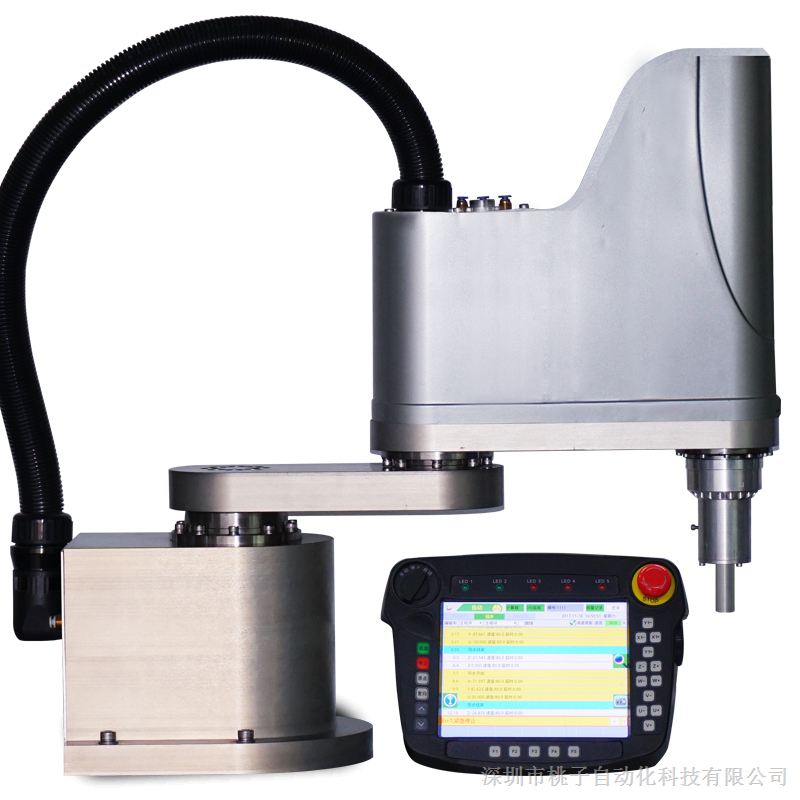
锁螺丝机器人属于公司的高精度、高速度、高性能机械人,该产品主要针对 3C 行业的机器人锁螺丝应用,本产品是基于之前开发的 600 臂长 SCARA机器人本体的基础上所开发的一种锁螺丝专用非标机器人,带视觉定位功能。其外观如图 1 所示,该机器人利用滑台模组传动方式,具有惯量小,刚度大,速度快,精度高,成本低等特点,可以配合多种锁付机构使用,其具体本体
3、设备主要配置列表
规格项目
规格指标
J1 325mm
机械臂长(1)
J2 235mm
J3100mm
负载
额定值 3kg
值 6kg
J1±132°
运动范围
J2±150°
J3100mm/150mm
重复定位精度
J1+J2 ±0.01mm
J3±0.01mm
J1400W
电机功率
J2400W
J3100W标准循环时间(2)
额定载荷0.60s
运动速度
J1+J26000mm/s
J3250mm/s
J1 137Nm
峰值驱动力 J256Nm J3 341N
用户接口电力线路15 线,带公头
空气线路Φ4×1,Φ6×2,带气管堵头
安装方式
台面安装
安装孔尺寸150×150(M8×4)
本体配置 Z 轴直径 Φ8mm
本体重量 20kg(100 行程)/21kg(150 行程)
清洁度无要求
线缆3m(标准)/5m(可选)/10m(可选)
环境适用
周围湿度: 10 -80% (非冷凝)
周围温度: 5℃- 40 ℃
产品尺寸(mm) L×W×H 835*170*530
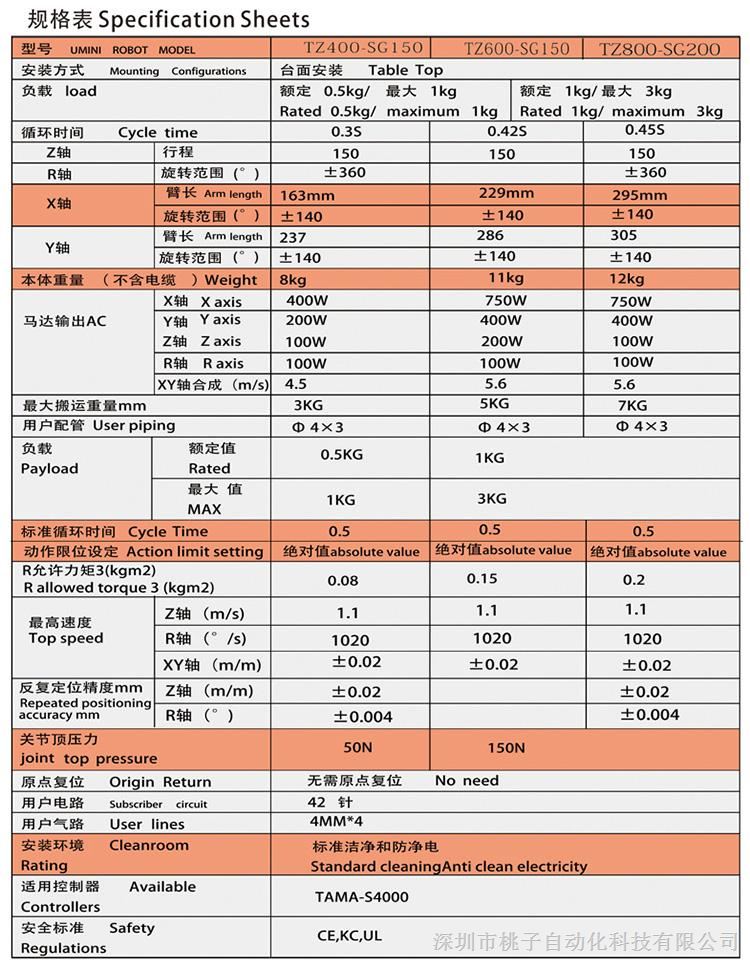
4、机械手参数
表 1 锁螺丝机器人本体参数列表
注:
(1)臂长是指,大臂底座中心到滑台中心的距离,
(2)标准循环时间是指标准门型指令时间,即 25*300*25 轨迹下的循环时
5、机械手图纸尺寸